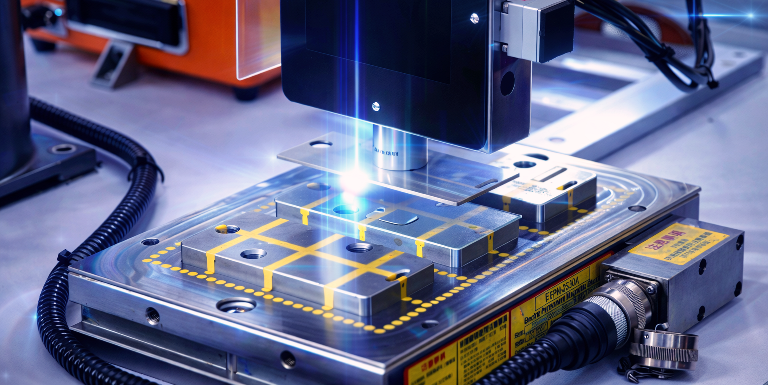
小型電磁石は、自動化およびロボティクス産業においてますます重要な役割を担っており、特にスマート製造、精密加工、物流仕分け、自動組立といった分野において、高い柔軟性と実用性を発揮しています。小型電磁石とは、電流がコイルに流れることで磁場を発生させ、制御可能な吸着力を生み出す装置であり、通電時には金属ワークを迅速に吸着し、電流を遮断すると即座に解放できる特性を持っています。このような即時のオン・オフ制御が可能な点は、自動化設備において非常に効率的なアクチュエータとして機能する理由となっています。従来の機械式クランプや空圧グリッパーと比較すると、小型電磁石は構造がシンプルで応答速度が速く、設置の自由度が高く、メンテナンスも比較的容易であるという利点があり、高頻度の繰り返し動作が求められる生産環境に特に適しています。
自動化生産ラインにおいては、小型の金属部品を連続的に搬送し、位置決め、ピックアップ、移載、仕分けといった工程を行う際に、小型電磁石は把持および解放にかかる時間を大幅に短縮し、タクトタイムの向上と機械構造の簡素化を実現します。ロボット分野では、小型電磁石はロボットアームのエンドエフェクタに組み込まれることが多く、ねじ、金属板、筐体、薄型ワーク、各種強磁性材料を迅速に把持することが可能です。このような用途は、電子製造、自動車部品の組立、金属部品の搬送、半自動検査プロセスなどで広く利用されています。柔軟な生産体制を重視する現代の工場において、小型電磁石の導入は装置のモジュール化を高めるだけでなく、多品種少量生産への対応力も向上させます。製品サイズやワーク形状、作業工程が変化した場合でも、制御パラメータや設置構成を調整することで迅速に対応でき、従来の治具のように大規模な改造を必要としない点は、自動化産業が求める高い柔軟性、高効率、低ダウンタイムという要件に合致しています。
さらに、小型電磁石はスマート物流および自動仕分けシステムにおいても高い応用価値を有しています。金属物体を迅速に識別・搬送する必要がある場面では、電磁吸着方式は従来の把持方法よりも直接的かつ効率的です。センサー、PLC制御、マシンビジョン、自動搬送システムと組み合わせることで、安定性と高効率を兼ね備えたインテリジェントな処理プロセスを構築することができます。技術的な観点から見ると、小型電磁石は制御の容易さに加え、さまざまな自動化システムとの高い統合性を持つ点でも評価されています。産業用ロボット、協働ロボット、専用自動化装置、カスタム機械など、あらゆる用途において、電圧、磁力、サイズ、通電方式を適切に設計することで、精度と効率の両立が可能となります。特に協働ロボットの普及が進む中で、小型電磁石は従来の機械式グリッパーに比べて挟み込みによる危険性が低く、人とロボットの協働を実現しやすい安全性の高い選択肢となっています。
一方で、小型電磁石にはいくつかの制約も存在します。最も重要な前提条件は、対象物が鉄や鋼などの強磁性体である必要がある点です。アルミニウム、銅、プラスチックなどの非磁性材料に対しては、他の把持技術との併用が必要となります。また、長時間の通電は発熱を引き起こす可能性があるため、高速連続運転環境では放熱設計、絶縁安定性、耐久性の確保が不可欠です。さらに、高精度や表面品質が求められる加工環境では、ワーク表面の凹凸や極薄形状、残留磁気などが把持および解放性能に影響を与える場合があります。そのため、自動化システムの設計においては、使用条件に応じた十分な評価と検討が必要です。
総じて、小型電磁石は単なる吸着部品にとどまらず、自動化技術の発展を象徴する重要なモジュールへと進化しています。それは現代産業が追求する高速化、小型化、知能化、モジュール化といった方向性を体現する存在です。インダストリー4.0、スマートファクトリー、AI制御技術の進展に伴い、小型電磁石は今後、基本的な搬送・固定機能を超えて、センサーフィードバック、省エネルギー制御、インテリジェントな判断機能、多機能エンドエフェクタとの統合へと発展していくと考えられます。これにより、生産効率とプロセスの安定性を向上させる中核的なコンポーネントとしての役割をさらに強めていくでしょう。企業にとっては、激化する製造競争の中で自動化能力を強化し、生産ラインの効率を高め、人手依存を低減するために、小型電磁石は極めて有用で将来性の高いソリューションであると言えます。