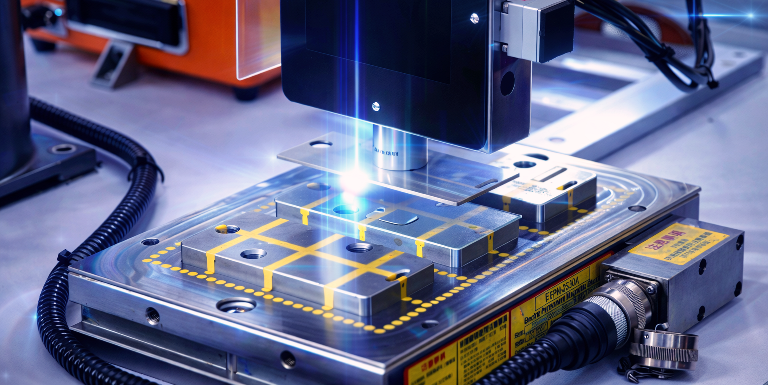
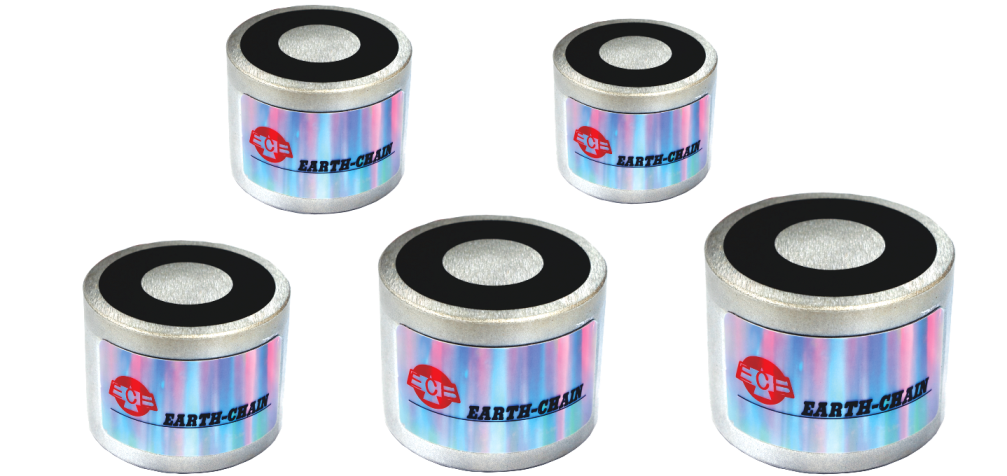
Small electromagnets are playing an increasingly important role in the automation and robotics industry, particularly in applications such as smart manufacturing, precision machining, logistics sorting, and automated assembly, where they demonstrate high flexibility and practical value. A small electromagnet operates by generating a magnetic field when an electric current passes through a coil, thereby creating a controllable attractive force that can rapidly attach to metal workpieces when energized and release them instantly when the power is turned off. This ability to start and stop immediately makes it a highly efficient execution component in automated systems. Compared to traditional mechanical fixtures or pneumatic grippers, small electromagnets offer advantages such as simple structure, fast response time, high installation flexibility, and relatively easy maintenance, making them especially suitable for production environments that require high-frequency repetitive operations.
In automated production lines, for example, when systems need to continuously handle small metal parts for positioning, picking, transferring, or sorting, small electromagnets can significantly reduce gripping and releasing time, improve cycle efficiency, and minimize mechanical complexity, resulting in a more streamlined equipment design. In the field of robotics, small electromagnets are commonly integrated into the end effectors of robotic arms, enabling robots to quickly pick up screws, metal sheets, housings, thin workpieces, and various ferromagnetic materials. This is particularly common in electronics manufacturing, automotive component assembly, metal part handling, and semi-automated inspection processes. For modern factories that emphasize flexible production, the adoption of small electromagnets not only enhances equipment modularity but also supports high-mix, low-volume manufacturing. When product dimensions, workpiece shapes, or operational workflows change, systems can often be quickly adjusted through control parameters and installation configurations, avoiding the need for extensive modifications required by traditional fixtures. This aligns well with the automation industry's focus on high flexibility, efficiency, and reduced downtime.
Furthermore, small electromagnets have significant application value in smart logistics and automated sorting systems. In scenarios where rapid identification and handling of metal objects are required, electromagnetic gripping is more direct and time-efficient than conventional clamping methods. When combined with sensors, PLC controllers, machine vision, and automated conveyor systems, they enable stable and highly efficient intelligent processing workflows. From a technical perspective, small electromagnets are favored not only for their simplicity of control but also for their strong compatibility with various automation systems. Whether used in industrial robots, collaborative robots, dedicated automation equipment, or custom-built machinery, they can be designed with appropriate voltage, magnetic force, size, and energizing modes to balance precision and efficiency. In particular, as collaborative robots become more widespread, small electromagnets offer a safer alternative by reducing the risk of mechanical pinching associated with traditional grippers, making them well-suited for human-robot collaboration.
However, small electromagnets are not without limitations. Their primary requirement is that the objects being handled must be ferromagnetic, such as iron or steel. For materials like aluminum, copper, plastics, or other non-magnetic substances, additional gripping technologies must be used in combination. Moreover, prolonged energization can lead to heat generation, and in high-speed continuous operations, proper thermal management, insulation stability, and durability must be considered to ensure reliable system performance. In addition, certain processing environments demand high precision and surface quality; uneven surfaces, extremely thin materials, or residual magnetism may affect the effectiveness of gripping and releasing. Therefore, a comprehensive evaluation based on specific operating conditions is essential when designing automation solutions.
Overall, small electromagnets are no longer merely simple components
for holding objects; they have become a representative key module in the
development of automation. They embody the modern industrial pursuit of high
speed, compact design, intelligence, and modularization. With the continuous
advancement of Industry 4.0, smart factories, and AI-driven control
technologies, small electromagnets are expected to evolve beyond basic handling
and clamping functions, integrating sensor feedback, energy-efficient control,
intelligent decision-making, and multifunctional end-effector capabilities.
This will position them as critical supporting components for improving overall
production efficiency and process stability. For enterprises seeking to strengthen
automation capabilities, enhance production line efficiency, and reduce
reliance on manual labor in an increasingly competitive manufacturing
environment, small electromagnets represent a highly valuable and promising
solution.